CAS
CAS
提示
CAS:如何不使用synchronized和Lock等锁实现线程安全的链表?
上几节讲到synchronized和Lock。在讲解它们的实现原理时,我们反复提到CAS。比如,多个线程竞争锁时,我们通过CAS来判定谁获得锁。竞争锁失败的线程加入等待队列时,我们使用CAS保证链表添加节点操作的线程安全性。除此之外,后面讲到的原子类、并发容器,其底层实现也会用到CAS。CAS是多线程开发基础中的基础。本节我们就来详细讲解一下CAS。在开始之前,请你思考,如何在不使用synchronized和Lock等锁的情况下,实现一个线程安全的链表?
一、CAS介绍
CAS指的是先检查后更新这类复合操作,英文翻译有多种:Compare And Set、Compare And Swap或Check And Set。示例代码如下所示。这段代码是我们从Lock锁的底层实现原理中,抽象出来的一段功能代码,state为共享变量,值为0表示没有加锁,值为1表示已加锁。多个线程同时调用tryAcquire()函数,谁将state变为1,谁就获取到了锁。
public class LockDemo {
private int state = 0;
public boolean tryAcquire() {
if (state == 0) {
state = 1;
return true;
}
return false;
}
}
很明显,tryAcquire()函数中的代码访问共享资源,并且包含复合操作,符合临界区的特征。多个线程竞态交叉执行tryAcquire()函数,有可能存在这样的情况:多个线程均检测到state等于0,并先后将其值设置为1,导致多个线程同时获取到同一把锁。因此,tryAcquire()是非线程安全的。
tryAcquire()函数之所以非线程安全,本质上是因为tryAcquire()函数中的代码是非原子操作。为了保证线程安全,我们可以使用synchronized或Lock对tryAcquire()函数加锁。不过,如果上述代码是synchronized或Lock的底层实现中的一部分,那么,我们就不能在实现锁(synchronized或Lock)时再递归地使用锁。如果我们不使用锁,那么,如何保证tryAcquire()函数的原子性呢?对于这种情况,我们可以使用硬件层面提供的CAS原子指令来解决。
二、硬件指令
X86提供的CAS指令为cmpxchg指令。指令格式如下所示。cmpxchg指令涉及三个操作数。目标操作数位于寄存器或内存中,用于存储变量的当前值C(CurrentValue)。源操作数位于寄存器中,用于存储变量的更新值N(NewValue)。隐藏的操作数位于AX寄存器中,在指令中没有明确指出,用于存储变量的期望值E(ExpectedValue)。
cmpxchg [目标操作数],[源操作数]
在执行cmpxchg指令时,CPU会判断变量的当前值C是否等于期望值E。如果当前值C跟期望值E相等的话,那么,CPU将更新值N赋值给存储当前值C的寄存器中,并设置标志寄存器中的ZF标志位为1,用来表示变量值更新成功。如果当前值C跟期望值E不相等,那么,CPU将当前值C赋值给存储期望值E的寄存器中,也就是AX寄存器中,并设置标志寄存器中的ZF标志位为0,用来表示变量值更新失败。
在单核计算机上,cmpxchg指令是原子操作。尽管cmpxchg指令包含很多细分操作,看似是非原子的复合操作,但是,指令是CPU执行的最小单元,指令执行的过程不可中断。多个线程共用一个CPU核来交替执行,只有当前线程执行完正在执行的指令(比如cmpxchg指令)之后,操作系统才可以调度CPU执行其他线程,其他线程是看不到cmpxchg指令执行的中间状态的。因此,cmxchg在单核计算机上是原子操作。
不过,在多核计算机上,cmpxchg指令却是非原子操作。在多核计算机上,多个线程可以并行运行在多个CPU核上,也就是说,多个线程可以并行执行cmpxchg指令,同时对同一个内存变量进行CAS操作,因此,cmpxchg就不再是原子操作了。在多核计算机中,为了保证cmpxchg指令的原子性,我们需要在cmpxchg指令前加LOCK前缀,如下所示。
LOCK cmpxchg [目标操作数], [源操作数]
在讲解volatile解决内存可见性问题时,我们也提到过LOCK前缀。实际上,LOCK前缀不仅仅可以同步缓存,还可以锁定总线,禁止多个CPU核同时操作一块共享的内存单元。这样就能保证多核计算机上,同一时刻只有一个CPU核在执行cmpxchg指令。这就相当于在硬件层面给cmpxchg指令加了锁。
三、native方法
尽管硬件层面提供了原子的CAS指令,但是,在高级的Java编程语言中,我们无法直接使用底层的CPU指令,JVM的Unsafe类中提供了大量的native方法,对比较底层的操作进行了封装,比如之前讲到的用于阻塞线程的park()、unpark()方法。
Unsafe类中提供了3个CAS方法,如下所示。o表示针对哪个对象的成员变量进行CAS操作。offset表示成员变量在对象中的偏移位置。oldValue为期望值,newValue为更新值。如果对象o中偏移位置为offset的成员变量的值等于oldValue,那么,对象o中偏移位置为offset的成员变量的值更新为newValue,并且CAS方法返回true。
public final native boolean compareAndSwapInt(
Object o, long offset, int oldValue, int newValue);
public final boolean compareAndSwapLong(
Object o, long offset, long oldValue, long newValue);
public final boolean compareAndSwapObject(
Object o, long offset, Object oldValue, Object newValue);
以上3个CAS方法的代码实现类似,我们拿compareAndSwapInt()方法举例讲解。Java是跨平台语言。针对不同的平台,compareAndSwapInt()方法的代码实现不同。在Linux_X86平台(CPU为X86,操作系统为Linux)下,compareAndSwapInt()方法的代码实现如下所示。在Hotspot JVM中,native方法在JVM中由C++代码实现,因此,我们需要在JVM源码中查看native方法的代码实现。
//以下代码位于unsafe.cpp中
UNSAFE_ENTRY(jboolean, Unsafe_CompareAndSwapInt(
JNIEnv *env, jobject unsafe, jobject obj, jlong offset, jint e, jint x))
UnsafeWrapper("Unsafe_CompareAndSwapInt");
oop p = JNIHandles::resolve(obj);
jint* addr = (jint *) index_oop_from_field_offset_long(p, offset);
return (jint)(Atomic::cmpxchg(x, addr, e)) == e;
UNSAFE_END
上述代码又调用了Atomic类中的cmpxchg()方法。cmpxchg()方法的代码实现如下所示。cmpxchg()方法通过在C++代码中调用汇编代码,来执行cmpxchg汇编指令。
inline jint Atomic::cmpxchg(
jint exchange_value, volatile jint* dest, jint compare_value) {
int mp = os::is_MP();
__asm__ volatile (LOCK_IF_MP(%4) "cmpxchgl %1,(%3)"
: "=a" (exchange_value)
: "r" (exchange_value), "a" (compare_value), "r" (dest), "r" (mp)
: "cc", "memory");
return exchange_value;
}
了解了Unsafe类中CAS方法的实现原理之后,我们使用这些CAS方法来实现tryAcquire()函数,对应的代码实现如下所示。代码比较简单,我们就不详细解释了。
public class Demo {
private int state = 0;
private static final Unsafe unsafe = Unsafe.getUnsafe();
private static final long stateOffset;
static {
try {
stateOffset = unsafe.objectFieldOffset(
Demo.class.getDeclaredField("state"));
} catch (Exception ex) { throw new Error(ex); }
}
public boolean tryAcquire() {
return unsafe.compareAndSwapInt(this, stateOffset, 0, 1);
}
}
四、失败处理
如果多个线程竞争执行CAS,那么,只有一个线程会执行成功,其他执行失败的线程又该如何处理呢?实际上,我们可以根据不同的业务场景,选择不同的处理策略,既可以转去执行失败处理逻辑(如tryAcquire()函数),也可以自旋执行CAS,直到执行成功为止。
我们举例解释一下自旋执行CAS这种处理策略,示例如下代码所示。如果我们希望increment()函数线程安全,那么,我们现在有两种处理方法,一种是使用synchronized或Lock对increment()函数加锁,对应代码为increment_lock()函数,另一种是使用CAS,对应代码为increment_CAS()函数。
public class Demo {
private int id = 0;
// 原始方法
public void increment() {
id++;
}
// 线程安全处理方法一:使用锁
public void increment_lock() {
synchronized (this) {
id++;
}
}
// 线程安全处理方法二:使用CAS
private static final Unsafe unsafe = Unsafe.getUnsafe();
private static final long idOffset;
static {
try {
idOffset = unsafe.objectFieldOffset(
Demo.class.getDeclaredField("id"));
} catch (Exception ex) { throw new Error(ex); }
}
public void increment_CAS() {
int oldValue = id;
int newValue = oldValue+1;
unsafe.compareAndSwapInt(this, idOffset, oldValue, newValue);
}
}
对比以上两种处理方法,Increment_lock()函数总是能让id值增一,但increment_cas()却不能,在CAS失败时,函数直接返回,id值并没有增一。也就是说,increment_cas()的处理方式,并不符合我们对increment()函数的逻辑要求(总是会增一)。对于这个问题,我们就可以使用自旋+CAS来解决。如下代码所示。
public void increment_CAS() {
boolean succeded = false;
while (!succeded) {
int oldValue = id;
int newValue = oldValue + 1;
succeded = unsafe.compareAndSwapInt(this, idOffset, oldValue, newValue);
}
}
前面我们讲过很多锁,偏向锁、轻量级锁、自旋锁等等,这里我们再介绍两种锁:悲观锁和乐观锁,它们属于抽象的概念,并不是具体实现。synchronized或Lock可以用来实现悲观锁,自旋+CAS可以用来实现乐观锁。乐观锁指的是乐观的认为不大可能会有资源竞争,大部分情况都不需要加锁。悲观锁指的是悲观的认为很有可能会出现资源竞争,需要加锁。
悲观锁和乐观锁各有利弊。基于synchornized或Lock实现的悲观锁,等待资源而阻塞线程会导致内核态到用户态的上下文切换,带来性能损耗,但是,处于阻塞状态的线程不会被分配CPU时间片,不会浪费CPU资源。基于自旋+CAS实现的乐观锁,循环执行CAS,不需要阻塞线程,没有内核态到用户态的上下文切换带来的性能损耗,但是,线程一直处于运行状态,白白浪费CPU资源。因此,如果多线程竞争资源不激烈,那么,使用乐观锁来竞争资源更合适,如果多线程竞争资源比较激烈,那么,使用悲观锁来竞争资源更合适。
五、应用场景
在本节的开始,我们留了一个思考题:如何实现一个线程安全的链表。实际上,这个问题在讲解Lock的底层实现原理时,已经被提及过。Lock底层使用的等待队列就是双向链表。多个线程会竞争操作等待队列,因此,等待队列必须是线程安全的。
我们对链表支持的操作做稍许简化,假设只支持在链表尾部添加元素这一操作。非线程安全的原始链表的定义如下所示。其中,使用虚拟头节点和tail尾指针是为了方便在链表尾部插入元素,并且,链表的虚拟头节点在初始化时已经创建好。了解更多链表操作,请参看我的《数据结构与算法之美》这本书。
public class AQSDemo {
public static final class Node {
private int threadId;
private Node prev;
private Node next;
public Node(int val, Node prev, Node next) {
this.threadId = val;
this.prev = prev;
this.next = next;
}
}
private Node head = new Node(-1, null, null); //虚拟头节点
private Node tail = head;
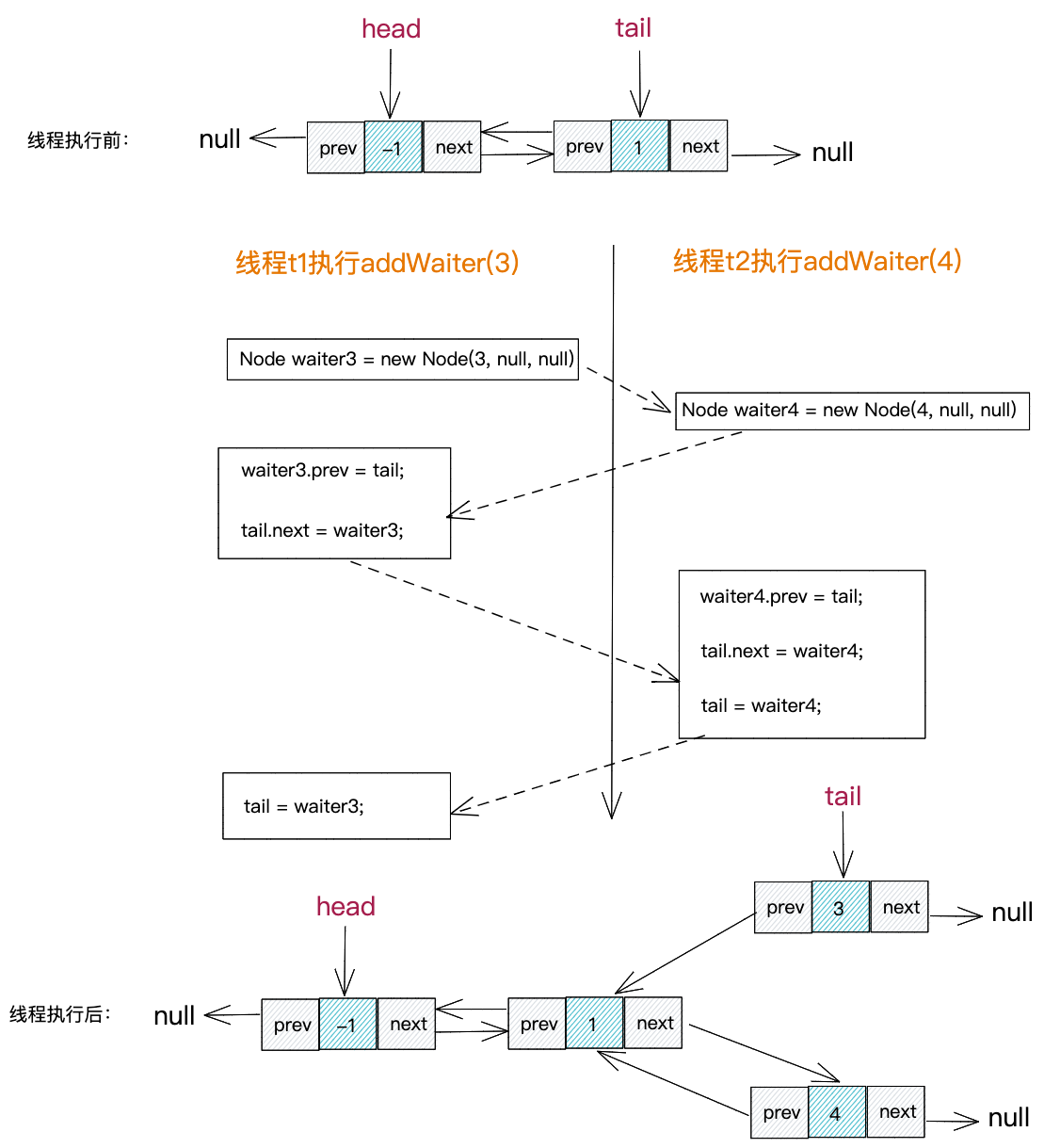
public void addWaiter(int val) {
Node waiter = new Node(val, null, null);
waiter.prev = tail;
tail.next = waiter;
tail = waiter;
}
}
上述代码中的addWaiter()函数访问共享资源(tail),并且包含复合操作(读写tail和tail.next),多线程竞态交叉执行addWaiter()函数会存在线程安全问题,如下例子所示,两个线程执行完之后,tail指向值为3的节点,而值为1的节点的next指针却指向值为4的节点。
我们可以使用CAS来保证addWaiter()函数线程安全,如下代码所示。多个线程竞争往链表尾部添加元素时,只有一个线程会成功执行CAS,将tail指针更新为指向自己的节点,其他线程执行CAS失败,继续自旋执行CAS,直到将元素成功添加到链表尾部为止。
public void addWaiter(int val) {
Node waiter = new Node(val, null, null);
for(;;) {
Node oldTail = tail;
if (unsafe.compareAndSwapObject(this, tailOffset, oldTail, waiter)) {
waiter.prev = oldTail;
oldTail.next = waiter;
return;
}
}
}
六、思考题
经常听到有人说,使用CAS或者自旋+CAS就是无锁编程,你觉得这样的说法严谨吗?